

 NVIDIA AI 블로그
NVIDIA AI 블로그  네이버 톡톡 제품 문의
네이버 톡톡 제품 문의 MDS테크 AI 스토어
MDS테크 AI 스토어
 윈도우와 IoT 이야기
윈도우와 IoT 이야기  IoT Tech Tube
IoT Tech Tube




ADAS 개발을 위한 Camera 기반 HIL Simulation
Camera 검증 솔루션(자율주행 차량 개발)
ADAS 및 자율주행 차량을 개발함에 있어, 정확성/안전성을 위해 아래의 '차량용 센서' 그림과 같이 다양한 센서가 복합적으로 적용되고 있습니다.특히, 주변 환경과 Object(사람, 차량, 사물, 동물, 도로 구조물 등)를 인지하는 목적으로 카메라가 큰 역할을 수행하게 됩니다.카메라로 영상을 취득하고 Image Processing Unit이 Data를 재가공하면, ADAS ECU에서 해당 Data를 이용해 타 PT/Chassis/Body part ECU와 능동제어를 수행하는 형태입니다. HIL Simulation을 통해 실제 차량 주행 환경과 흡사한 테스트 환경을 구축하여, 카메라 based ECU 및 여러 ECU를 통합 테스트할 수 있습니다. 아래의 '다양한 카메라 ECU 검증 시스템' 그림과 같이 카메라 검증 솔루션에 사용되는 방식은 Raw data 직접 주입 방식의 'Option 3'와 OTA(Over the Air)방식의 'Option 4'가 있습니다.
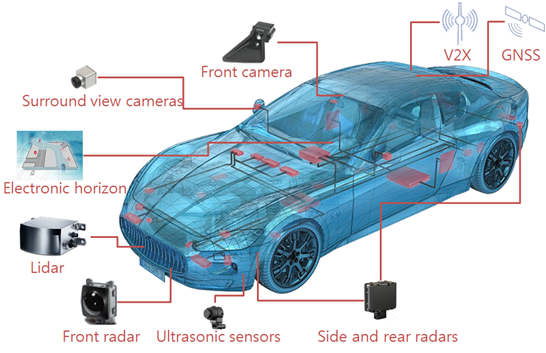
<차량용 센서>
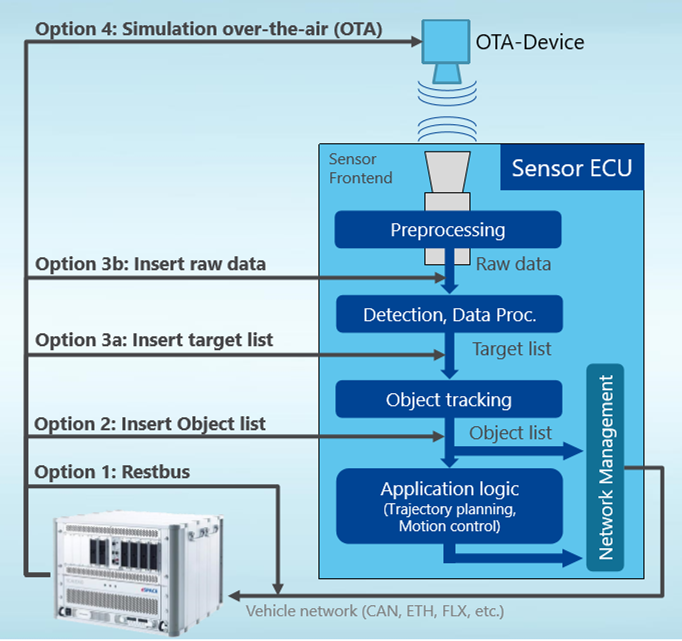
<다양한 카메라 ECU 검증 시스템>
특징 Features
Option 3 : Insert Raw Data
ㆍ카메라 영상으로부터 들어오는 Raw data를 Image processing Unit(영상처리 장치)에 직접 넣는 방법ㆍRaw data 정보와 Image processing Unit의 Interface가 필요하며, Sensor에서 생기는 오차를 최소화하면서 센서 입력을 사용자가 직접 조정하며 개발 및 검증 가능
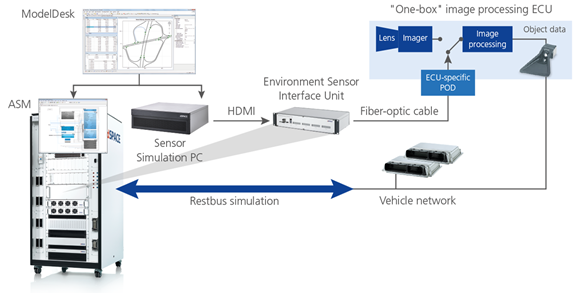
<Option 3 방식을 이용한 카메라 ECU 검증 시스템>
Option 4 : Simulate Sensor Front end Over-the Air(OTA)
ㆍ실제 센서에서 영상 정보를 받을 수 있도록 센서 Simulation 환경을 만드는 방법ㆍ현재 가장 많이 사용되는 카메라 ECU 검증 방법이며 특별히 카메라 렌즈 특성 및 Image Processing Unit의 특성 반영이 필요 없는 다소 도입하기 쉬운 테스트 환경
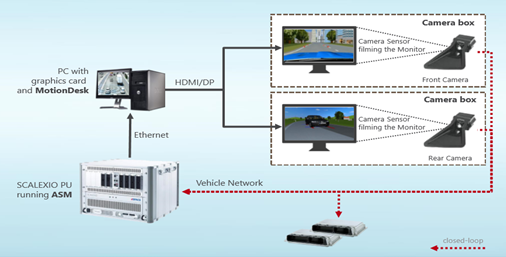
<Option 4 방식을 이용한 카메라 ECU 검증 시스템>
기능
카메라 특성을 반영한Raw Data 기반의 카메라 ECU 검증 가능
다양한 View를 적용한OTA 기반의 카메라 ECU 검증 가능
차량 모델과 가상 주행 환경을 통해다양한 Test Case에 대한시뮬레이션 가능
장점
Pincushion distortion, barrel distortion, vignetting, chromatic aberration 등의 카메라 특성을 반영
MotionDesk를 통해 렌즈의 특성(principle point, Focus length) 반영
카메라의 위치나 화각 변경 가능

<실제 카메라 Based ECU 구조 비교>

<시간대 별 조도 변경 환경 제공>
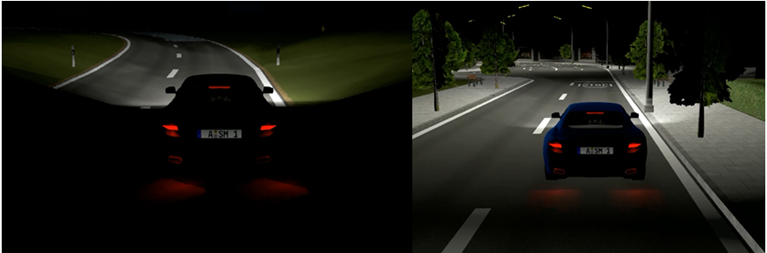
<야간 주행 환경 제공>
기대효과